西藏協作機器人力控系統
在現代智能化制造中,多個機器人常常需要協同工作以完成復雜的生產任務。機器人力控技術在這一過程中扮演了重要角色。通過精確的力感知和控制,機器人能夠與其他機器人無縫協作,避免碰撞和,確保各個機器人的工作能夠高度協調。這不僅提高了生產線的整體效率,也減少了因操作不當引發的生產瓶頸。達寬科技的機器人力控系統,憑借其精細的力控制技術,幫助多個機器人在同一生產線中實現高效協同,提升了生產線的協作效率和靈活性,使企業能夠更好地應對多變的生產需求。機器人力控系統為企業帶來了高效、精確、穩定的生產模式,達寬科技的技術使得自動化生產更加智能化和安全。西藏協作機器人力控系統
機器人力控技術的應用,不僅提升了生產效率,還為企業的產品開發和創新提供了支持。由于機器人能夠根據不同的生產需求靈活調整力和動作,它可以在復雜的生產任務中保持極高的精度和穩定性,這為新產品的研發提供了更多的可能性。無論是在制造高精度零部件、進行復雜的裝配操作,還是進行創意設計的實驗性生產,機器人力控都能提供強大的技術保障。達寬科技的機器人力控技術,憑借其先進的控制系統和高精度的操作能力,幫助企業在新產品開發過程中快速驗證生產工藝,縮短研發周期,提升創新能力,從而增強企業的市場競爭力。遼寧協作機器人力控配置機器人力控技術增強了機器人對外部變化的應對能力,達寬科技的技術讓自動化生產更加高效。

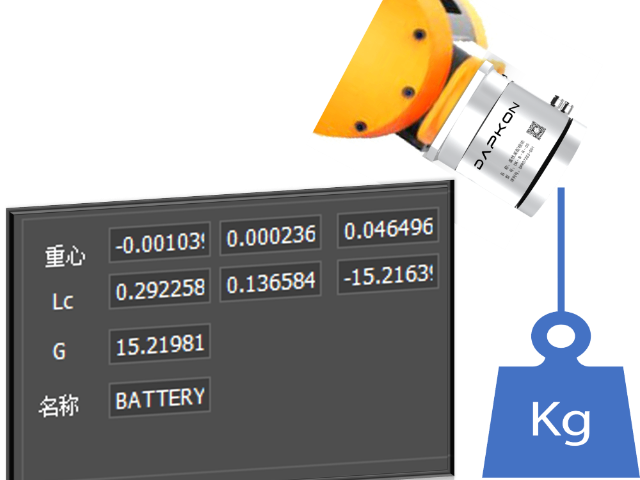
機器人力控技術通過精確控制機器人的作用力和運動軌跡,顯著提高了生產效率和產品質量。達寬科技的力控系統具備強大的負載辨識能力,能夠精確計算并識別末端負載的重量和重心參數,確保在自動化流程中對負載的精確控制。此外,系統支持在多種工況下進行力控調節,無論是常規作業還是特殊應用場景,都能實現一致性的力控調節。這種高精度的控制能力有效減少了因力位誤差導致的質量問題,從而保證了長期穩定的高質量輸出。
在人機協作場景中,安全始終是首要考慮因素。達寬科技的機器人力控系統配備了靈活的超限報警功能,允許用戶針對每個監測方向設定兩級報警閾值。一旦監測到超出設定的安全值,系統不僅會發出警報信號,還將自動中斷裝配流程,確保傳感器和工件的安全。此外,達寬科技的軟件采用直觀的用戶界面設計,將復雜的機器人控制和力控算法置于后臺,讓非專業人士也能輕松上手。這種友好的操作體驗大幅降低了操作錯誤的風險,同時提升了工作效率。
隨著協作機器人(cobot)的普及,機器人與人類的合作已成為現代制造業的重要趨勢。機器人力控技術在這種合作中發揮著至關重要的作用。通過精確控制機器人施加的力量,機器人能夠更加安全、穩定地與人類操作員共同工作。機器人力控技術可以實時感知操作環境的變化,避免機器人與人類發生意外碰撞,從而保障員工的安全。同時,機器人能夠在需要時減小操作力,避免傷害。達寬科技的機器人力控系統提供了更為靈活的協作模式,使得機器人與人類之間的配合更加高效、和諧,為企業帶來更加智能化的生產環境。通過機器人力控,達寬科技幫助企業提升了生產線的安全性和穩定性,降低了停機風險。

在高精度要求的制造行業,零部件裝配的精度對終產品質量至關重要。機器人力控技術的應用,使得機器人能夠精確調節施加的力,確保每一個零部件在裝配過程中都能達到理想的接合力和位置,避免了因力過大或過小而導致的裝配誤差。尤其在精密儀器、電子產品以及機械等領域,機器人力控技術的精細度能夠確保零部件的完美契合,減少了產品的返工率。達寬科技的機器人力控系統,不僅提升了生產過程中每個環節的精度,還確保了整個生產線的穩定運行,優化了終產品的裝配質量。通過達寬科技的機器人力控技術,用戶可以有效避免過載問題,提升機器人的穩定性,確保高效安全的生產環境。山東工業機器人力控系統
利用機器人力控,達寬科技讓生產線在高負荷運轉下依舊保持高效率,為客戶帶來更穩定的生產周期。。西藏協作機器人力控系統
由于線束種類不同,接口不同,受力面的面數不同,所以每個種類的線束需要的力控參數是不一樣的,我們需要對每一類線束進行單獨設置。這樣,在接口裝配過程中,達寬機器人力控系統通過調整機器人的位置和姿態,還能更有效地減少由外力的干擾。在提供的GIF動畫中,我們可以觀察到達寬力控系統界面中,六維力曲線的實時變化,除了FX方向外,其他方向的力被有效抵消。為了避免因力過大導致接口損壞,就得讓機器人施加的力在安全閾值內。因此,我們可以引入力超限報警機制。考慮到不同線束接口的工藝差異,達寬科技的柔性力控系統設計了靈活的報警功能,允許在每個監測方向上設置兩級報警閾值,以提高報警功能的適應性。同時,我們設置了裝配時間超時報警,防止機器人裝配失敗且力還在安全閾值內時,時間過長的問題。我們還設置了超限自動退出功能。一旦監測到力超出預設的安全值或時間超時,系統將發出警報并自動停止裝配流程,從而保護接口,并提醒相關工作人員。西藏協作機器人力控系統
- 河南工業機器人力控測試 2025-04-01
- 浙江工業機器人力控供應商 2025-04-01
- 內蒙古工業機器人力控推廣 2025-04-01
- 廣東達寬科技力控系統報價 2025-04-01
- 天津協作機器人力控原理 2025-04-01
- 江蘇機器人力控測試 2025-04-01
- 黑龍江工業機器人力控使用方法 2025-04-01
- 湖北裝配力控系統推薦 2025-04-01
- 吉林工業機器人力控設計 2025-04-01
- 西藏協作機器人力控報價 2025-04-01
- 人臉識別設備攝像頭廠家供應 2025-04-01
- 嵊州打印機租賃方案 2025-04-01
- 上海智慧城市路燈Wi-SUN網絡系統 2025-04-01
- 昌平區定制網絡營銷調節 2025-04-01
- 微信支付消費機怎么樣 2025-04-01
- 寧德超聲波清洗機采購 2025-04-01
- 福建臥式工控機箱訂制 2025-04-01
- 珠海飛騰便攜式移動指揮終端加固計算機供應商 2025-04-01
- 江西應用KISSsoft代理 2025-04-01
- 江蘇法院子母鐘報價 2025-04-01