-
 天津環保光伏清潔機器人服務熱線
天津環保光伏清潔機器人服務熱線灰塵類型特殊:在一些特殊環境,如工業污染區、礦區附近,光伏板表面的灰塵可能具有粘性或腐蝕性。工業污染區的灰塵中可能含有油污、重金屬顆粒等,這些灰塵在光伏板表面干燥后會形成粘性很強的污垢,普通的清潔方式難以徹底清掃。礦區附近的灰塵可能含有酸性或堿性物質,具有腐蝕...
2025-02-17 -
 西藏供應光伏清潔機器人哪里買
西藏供應光伏清潔機器人哪里買模塊化設計理念:采用模塊化設計,光伏清潔機器人的各個部件都具有易于拆卸和更換的特點。它將機器人分為清潔模塊、驅動模塊、控制模塊、電源模塊等多個獨有的模塊,每個模塊都有明確的功能和接口。當某個部件出現故障時,工作人員只需使用簡單的工具,即可快速將故障模塊拆卸下來...
2025-02-16 -
 青海集成光伏清潔機器人設備廠家
青海集成光伏清潔機器人設備廠家機器人數量不足:在大型光伏電站中,光伏板的數量眾多,清潔任務繁重。如果配備的光伏清潔機器人數量不足,清潔工作的覆蓋范圍和頻率將受到嚴重限制。例如,一個占地面積達 1000 畝的大型光伏電站,擁有數百萬塊光伏板,若配備了 10 臺清潔機器人,按照每臺機器人每天工...
2025-02-15 -
 山東國內光伏清潔機器人廠家批發價
山東國內光伏清潔機器人廠家批發價集成化發展期(與其他系統融合):近年來,光伏清潔機器人朝著集成化方向發展。一方面,與光伏電站的監控系統進行深度融合,機器人可以實時將清潔狀態、自身運行狀況等信息反饋給監控中心,工作人員通過監控系統就能遠程了解機器人的工作情況,并進行必要的操作和調整。另一方面,...
2025-02-15 -
 天津新能源光伏清潔機器人代理價錢
天津新能源光伏清潔機器人代理價錢環境適應能力:無論是酷熱的沙漠環境,白天溫度常常高達 40℃以上,地表溫度甚至更高,還是濕度較高的沿海地區,空氣濕度常年保持在 70% - 80%,亦或是地形復雜的山地,地勢起伏較大,光伏清潔機器人都能展現出強大的環境適應性。其外殼采用耐高溫、耐腐蝕且具有良好...
2025-02-14 -
 湖南國內光伏清潔機器人市場價格
湖南國內光伏清潔機器人市場價格環境適應能力:無論是酷熱的沙漠環境,白天溫度常常高達 40℃以上,地表溫度甚至更高,還是濕度較高的沿海地區,空氣濕度常年保持在 70% - 80%,亦或是地形復雜的山地,地勢起伏較大,光伏清潔機器人都能展現出強大的環境適應性。其外殼采用耐高溫、耐腐蝕且具有良好...
2025-02-14 -
廣東節能光伏清潔機器人哪里買
環境適應能力:無論是酷熱的沙漠環境,白天溫度常常高達 40℃以上,地表溫度甚至更高,還是濕度較高的沿海地區,空氣濕度常年保持在 70% - 80%,亦或是地形復雜的山地,地勢起伏較大,光伏清潔機器人都能展現出強大的環境適應性。其外殼采用耐高溫、耐腐蝕且具有良好...
2025-02-13 -
西藏購買光伏清潔機器人銷售公司
深入探究其清潔原理,光伏清潔機器人展現出精妙之處。特制的毛刷選用防靜電且質地柔軟的纖維材質,既能吸附灰塵防止二次揚塵,又不會劃傷光伏板表面的鍍膜。配合精細的噴淋系統,噴出的水霧呈微米級均勻分布,迅速濕潤灰塵,降低其附著力。而且,機器人能根據灰塵厚度自動控制噴水...
2025-02-12 -
江西智能光伏清潔機器人服務電話
光伏機器人的發展歷程: 產品初步應用期(商業化開端):經過前期技術研發和改進,一些較為成熟的光伏清潔機器人產品開始推向市場。在一些大型光伏電站,這些機器人開始進行試點應用。它們能夠在無人值守的情況下,自動完成光伏板的清潔工作,不僅節省了大量人力成本,...
2025-02-12 -
陜西國內光伏清潔機器人哪家好
通訊故障:光伏清潔機器人與控制中心之間通過無線通信技術進行數據傳輸和指令交互。若出現通訊故障,可能無法接收正確的指令,也無法反饋自身的運行狀態。例如,在信號干擾較強的區域,如靠近高壓線、大型變電站的光伏電站,通信信號可能會受到嚴重干擾,導致數據傳輸中斷或錯誤。...
2025-02-11 -
 北京自動化光伏清潔機器人哪家強
北京自動化光伏清潔機器人哪家強光伏板布局復雜:當光伏電站的光伏板布局較為復雜,存在不同角度、高度的安裝方式時,清潔機器人可能難以完全適應。一些特殊地形的光伏電站,如山地、丘陵地區,光伏板可能安裝在不同坡度的山坡上,角度從 15° 到 45° 不等,高度落差可達數米。清潔機器人在面對這些復雜...
2025-02-11 -
 西藏集成光伏清潔機器人什么價格
西藏集成光伏清潔機器人什么價格清潔周期過長:光伏清潔機器人的清潔周期設置是保障光伏板高效發電的關鍵因素之一。光伏板長期暴露在戶外環境中,灰塵、鳥糞、花粉等污染物會持續沉降在其表面。若清潔周期設定過長,例如在工業粉塵較多的區域,每月一次的清潔周期遠遠無法滿足實際需求。隨著時間推移,污染物不斷...
2025-02-10 -
甘肅環保光伏清潔機器人批發廠家
萌芽階段(早期探索):隨著光伏產業的興起,光伏板表面積塵影響發電效率的問題逐漸凸顯。在 20 世紀末,一些科研人員和企業開始設想利用自動化設備來解決光伏板清潔難題,這便是光伏清潔機器人的萌芽。雖然當時技術條件有限,但這個概念的提出為后續發展埋下了種子。研究人員...
2025-02-10 -
新疆環保光伏清潔機器人批發廠家
軌道損壞:對于采用軌道運行的光伏清潔機器人,軌道是其運行的基礎。若軌道出現損壞,如變形、斷裂等情況,機器人的運行將受到阻礙。軌道在長期使用過程中,可能會因承受機器人的重量、溫度變化、外力撞擊等因素而發生變形。例如,在冬季寒冷地區,軌道可能因熱脹冷縮而出現裂縫;...
2025-02-10 -
 遼寧新型光伏清潔機器人銷售公司
遼寧新型光伏清潔機器人銷售公司環境適應能力:無論是酷熱的沙漠環境,白天溫度常常高達 40℃以上,地表溫度甚至更高,還是濕度較高的沿海地區,空氣濕度常年保持在 70% - 80%,亦或是地形復雜的山地,地勢起伏較大,光伏清潔機器人都能展現出強大的環境適應性。其外殼采用耐高溫、耐腐蝕且具有良好...
2025-02-09 -
河北多功能光伏清潔機器人市場價格
環境溫度過高:在高溫環境中,光伏清潔機器人的電子元件性能可能會下降。電子元件如芯片、電容等在高溫下會出現漏電、參數漂移等問題,進而影響其正常運行。電機作為機器人的動力關鍵,在高溫環境下更容易過熱。當電機過熱時,其輸出功率會降低,導致清潔速度變慢甚至無法工作。例...
2025-02-09 -
江西購買光伏清潔機器人誠信合作
系統可擴展性:該機器人系統具備出色的可擴展性,能夠根據光伏電站的規模大小和實際需求,靈活地增加或減少機器人數量。系統采用分布式架構設計,各個機器人之間可以實現協同工作,并且能夠與電站的整體管理系統無縫對接。在小型的分布式光伏電站中,可以先部署少量的機器人進行試...
2025-02-09 -
 山西直銷光伏清潔機器人哪里買
山西直銷光伏清潔機器人哪里買濕度影響:在高濕度環境下,如沿海地區、熱帶雨林地區,空氣濕度常常超過 80%。光伏板表面容易形成水汽凝結,與灰塵混合后形成更難清潔的污漬。這些污漬具有粘性,且可能含有微生物,會在光伏板表面滋生繁殖。光伏清潔機器人若不能有效應對這種情況,清潔效果就會大打折扣。所...
2025-02-09 -
 山西定制光伏清潔機器人供應商
山西定制光伏清潔機器人供應商穩定爬坡能力:對于山地等具有坡度的光伏電站,該機器人具備穩定的爬坡能力,能夠輕松攀爬 20° - 30° 的斜坡。它采用特殊的行走機構,增加了與地面的摩擦力。同時,配備了大功率的驅動電機和先進的動力分配系統,能夠根據坡度的變化自動調整動力輸出。在爬坡過程中,機...
2025-02-09 -
福建光伏清潔機器人服務電話
穩定爬坡能力:對于山地等具有坡度的光伏電站,該機器人具備穩定的爬坡能力,能夠輕松攀爬 20° - 30° 的斜坡。它采用特殊的行走機構,增加了與地面的摩擦力。同時,配備了大功率的驅動電機和先進的動力分配系統,能夠根據坡度的變化自動調整動力輸出。在爬坡過程中,機...
2025-02-08 -
青海購買光伏清潔機器人代理商
系統可擴展性:該機器人系統具備出色的可擴展性,能夠根據光伏電站的規模大小和實際需求,靈活地增加或減少機器人數量。系統采用分布式架構設計,各個機器人之間可以實現協同工作,并且能夠與電站的整體管理系統無縫對接。在小型的分布式光伏電站中,可以先部署少量的機器人進行試...
2025-02-08 -
陜西新型光伏清潔機器人市場價格
精細定位技術:該機器人搭載先進的激光定位系統,該系統通過發射和接收激光束來感知周圍環境。憑借其高精度的識別能力,誤差可控制在毫米級,能夠精細鎖定光伏板的位置與邊界。在清潔過程中,無論是大面積的光伏陣列還是形狀不規則的分布式光伏板,它都能夠實現高達 99% 以上...
2025-02-08 -
內蒙古國內光伏清潔機器人廠家電話
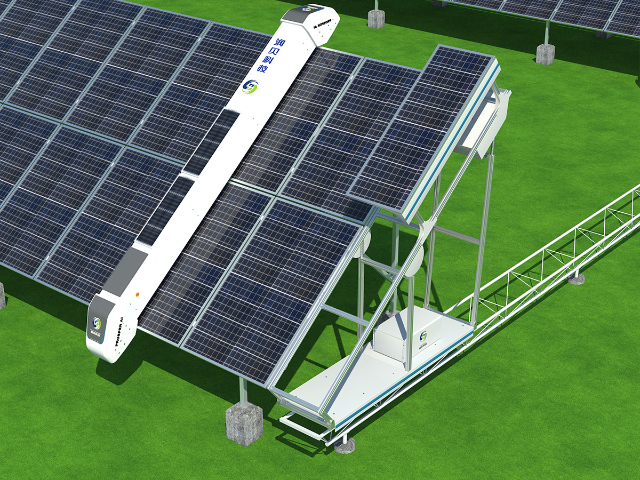
光伏清潔機器人,作為現代光伏產業中的關鍵設備,正重塑著電站運維的格局。它可不是簡單的清潔工具,其設計融合了多學科智慧。從機械結構看,采用輕量化高質量材質打造機身,確保在光伏板間移動自如,同時搭載可靈活調節角度與力度的清潔組件,無論是平面還是斜面光伏板,都能緊密...
2025-02-08 -
西藏光伏清潔機器人廠家批發價
缺乏數據分析:如果沒有對光伏清潔機器人的清潔數據進行有效的分析,就無法及時發現清潔過程中存在的問題。清潔數據包括清潔效率、清潔覆蓋率、清潔時間、機器人故障次數等。通過對這些數據的分析,可以了解機器人的工作狀態是否正常,清潔效果是否達標。例如,若清潔效率持續降低...
2025-02-08 -
福建集成光伏清潔機器人哪家便宜
深入探究其清潔原理,光伏清潔機器人展現出精妙之處。特制的毛刷選用防靜電且質地柔軟的纖維材質,既能吸附灰塵防止二次揚塵,又不會劃傷光伏板表面的鍍膜。配合精細的噴淋系統,噴出的水霧呈微米級均勻分布,迅速濕潤灰塵,降低其附著力。而且,機器人能根據灰塵厚度自動控制噴水...
2025-02-07 -
浙江光伏清潔機器人批發商
國際競爭與合作期(全球市場拓展):隨著光伏產業在全球范圍內的快速發展,光伏清潔機器人市場也逐漸走向國際化。各國企業紛紛加大研發投入,推出具有競爭力的產品,在全球市場展開激烈競爭。同時,國際間的技術合作也日益頻繁,不同國家的企業和科研機構通過合作研發、技術交流...
2025-02-07 -
江蘇自動化光伏清潔機器人供應商家
未來展望期(持續創新發展):展望未來,光伏清潔機器人將繼續朝著更高效、智能、環保的方向發展。在技術創新方面,新型材料的應用可能會使機器人更加輕便且耐用,同時進一步提升清潔效果。人工智能技術的深入發展將使機器人具備更強的自主學習和決策能力,能夠更好地適應復雜多變...
2025-02-07 -
湖南智能光伏清潔機器人設備廠家
缺乏數據分析:如果沒有對光伏清潔機器人的清潔數據進行有效的分析,就無法及時發現清潔過程中存在的問題。清潔數據包括清潔效率、清潔覆蓋率、清潔時間、機器人故障次數等。通過對這些數據的分析,可以了解機器人的工作狀態是否正常,清潔效果是否達標。例如,若清潔效率持續降低...
2025-02-07 -
新型光伏清潔機器人哪家便宜
新老光伏板混合:當光伏電站中既有新安裝的光伏板,又有使用多年的舊光伏板時,光伏清潔機器人可能難以兼顧兩者的清潔需求。舊光伏板由于長期使用,可能存在老化、損壞等問題,如表面的減反射膜磨損、電池片出現微裂紋等,這些問題會導致其發電效率本身就較低,即使清潔后發電提升...
2025-02-07 -
重慶銷售光伏清潔機器人廠家批發價
灰塵類型特殊:在一些特殊環境,如工業污染區、礦區附近,光伏板表面的灰塵可能具有粘性或腐蝕性。工業污染區的灰塵中可能含有油污、重金屬顆粒等,這些灰塵在光伏板表面干燥后會形成粘性很強的污垢,普通的清潔方式難以徹底清掃。礦區附近的灰塵可能含有酸性或堿性物質,具有腐蝕...
2025-02-06