-
 海南5G主動安全預(yù)警系統(tǒng)
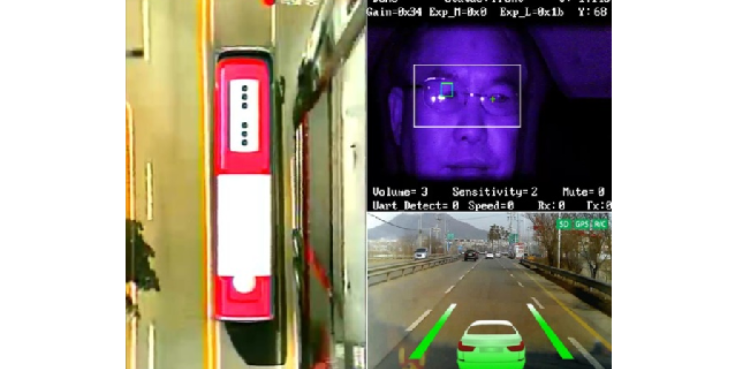
海南5G主動安全預(yù)警系統(tǒng)(下篇)車載紅外熱像儀的技術(shù)原理主要基于紅外熱成像技術(shù),這是一種通過捕捉物體發(fā)出的紅外輻射,并將其轉(zhuǎn)化為對應(yīng)的熱圖像,進而反映物體表面溫度分布的技術(shù)。以下是車載紅外熱像儀技術(shù)原理的詳細(xì)解釋: 圖像的生成與顯示:經(jīng)過放大和處理后的電信號被送入圖像處理軟...
2025-04-10 -
 新疆物聯(lián)網(wǎng)主動安全預(yù)警系統(tǒng)聯(lián)系方式
新疆物聯(lián)網(wǎng)主動安全預(yù)警系統(tǒng)聯(lián)系方式(專輯一)疲勞駕駛預(yù)警系統(tǒng)的應(yīng)用領(lǐng)域廣FAN,主要涵蓋了那些需要長時間駕駛或駕駛條件較為復(fù)雜的場景。以下是該系統(tǒng)的幾個主要應(yīng)用領(lǐng)域: 1.道路運輸行業(yè)道路運輸行業(yè)是疲勞駕駛預(yù)警系統(tǒng)的重要應(yīng)用領(lǐng)域。長途貨運和客運車輛由于需要長時間連續(xù)行駛,駕駛員容易因...
2025-04-09 -
 上海礦車360全車可視系統(tǒng)
上海礦車360全車可視系統(tǒng)(下篇)AI360視覺拼接集成BSD盲區(qū)預(yù)警系統(tǒng)在油罐車的應(yīng)用,主要體現(xiàn)在提升車輛行駛安全性、減少盲區(qū)事故以及加強貨物安全監(jiān)控等方面。以下是對該系統(tǒng)在油罐車上應(yīng)用的詳細(xì)分析: 四、應(yīng)用效果與前景AI360視覺拼接集成BSD盲區(qū)預(yù)警系統(tǒng)在油罐車上的應(yīng)用...
2025-04-09 -
 陜西5G主動安全預(yù)警系統(tǒng)廠家供應(yīng)
陜西5G主動安全預(yù)警系統(tǒng)廠家供應(yīng)(下篇)叉車AI防撞預(yù)警系統(tǒng)是專為叉車設(shè)計的智能設(shè)備集成了多種先進技術(shù),其工作技術(shù)原理可以具體闡述如下: 安全檢測算法實時監(jiān)測叉車和駕駛員的狀態(tài),及時發(fā)現(xiàn)潛在的安全隱患。 3,數(shù)據(jù)傳輸與通信:采用3G/4G無線傳輸技術(shù),將處理后的視頻錄像、行駛...
2025-04-09 -
 中國香港私家車主動安全預(yù)警系統(tǒng)技術(shù)解決方案
中國香港私家車主動安全預(yù)警系統(tǒng)技術(shù)解決方案(下篇)叉車AI防撞預(yù)警系統(tǒng)專為叉車設(shè)計的一款智能設(shè)備,支持IP67防水,集車載視頻監(jiān)控、行車記錄儀、DSM駕駛員狀態(tài)分析系統(tǒng)、BSD盲區(qū)監(jiān)控于一體。內(nèi)置AI高性能處理芯片,采用H.265視頻編解碼技術(shù),能夠?qū)崿F(xiàn)駕駛員人臉識別、控車、安全檢測等功能。結(jié)合3...
2025-04-09 -
 青海物流車主動安全預(yù)警系統(tǒng)推薦廠家
青海物流車主動安全預(yù)警系統(tǒng)推薦廠家集裝箱正面吊運機安裝4G 360全景環(huán)視影像系統(tǒng)的效果展示,主要體現(xiàn)在以下幾個方面: 一、提升作業(yè)視野與安全性全方WEI視野覆蓋:通過安裝在車身周圍及吊具上的4個(或更多)超廣角高清攝像頭,實時采集車身四周及吊具下方的圖像信息。這些圖像信息經(jīng)過先進的...
2025-04-09 -
 重慶船舶主動安全預(yù)警系統(tǒng)廠家供應(yīng)
重慶船舶主動安全預(yù)警系統(tǒng)廠家供應(yīng)(上篇)車載紅外熱像儀的技術(shù)原理主要基于紅外熱成像技術(shù),這是一種通過捕捉物體發(fā)出的紅外輻射,并將其轉(zhuǎn)化為對應(yīng)的熱圖像,進而反映物體表面溫度分布的技術(shù)。以下是車載紅外熱像儀技術(shù)原理的詳細(xì)解釋: 一、紅外輻射與熱成像紅外輻射:自然界中,凡是溫度大于絕DU...
2025-04-08 -
 江蘇乘用車主動安全預(yù)警系統(tǒng)生產(chǎn)廠家
江蘇乘用車主動安全預(yù)警系統(tǒng)生產(chǎn)廠家(下篇)360全景智防安全觸控一體機BSD盲區(qū)監(jiān)測預(yù)警系統(tǒng)是一種先進的車輛安全輔助系統(tǒng),通過360環(huán)視的高清攝像頭不間斷地探測車輛前后左右盲區(qū)范圍內(nèi)的物體,并根據(jù)物體距離本車的遠(yuǎn)近程度劃分報警級別,通過觸控屏顯示障礙物距離并觸發(fā)聲光報警器發(fā)出預(yù)警。該系統(tǒng)功...
2025-04-08 -
 江西工礦車主動安全預(yù)警系統(tǒng)方案商
江西工礦車主動安全預(yù)警系統(tǒng)方案商(下篇)叉車防撞預(yù)警系統(tǒng)的后臺管理實現(xiàn),主要依賴于一系列先進的技術(shù)手段和管理策略,以確保系統(tǒng)的穩(wěn)定運行和高效管理。 二,用戶權(quán)限管理:設(shè)置不同級別的用戶權(quán)限,確保只有授權(quán)人員才能訪問系統(tǒng)。記錄用戶的操作日志,以便追溯和審計。報警與通知:當(dāng)系統(tǒng)檢測到潛...
2025-04-08 -
 吉林云臺主動安全預(yù)警系統(tǒng)聯(lián)系方式
吉林云臺主動安全預(yù)警系統(tǒng)聯(lián)系方式(專輯二)輪船拼接360全景影像的技術(shù)難度主要體現(xiàn)在以下幾個方面: 動態(tài)物體處理:如果在拍攝過程中輪船上有移動的物體(如人員、海浪等),這些動態(tài)物體可能會在不同圖像之間出現(xiàn)不匹配的情況。為了保持全景影像的連續(xù)性和準(zhǔn)確性,需要采用適當(dāng)?shù)乃惴▉硖幚磉@些...
2025-04-08 -
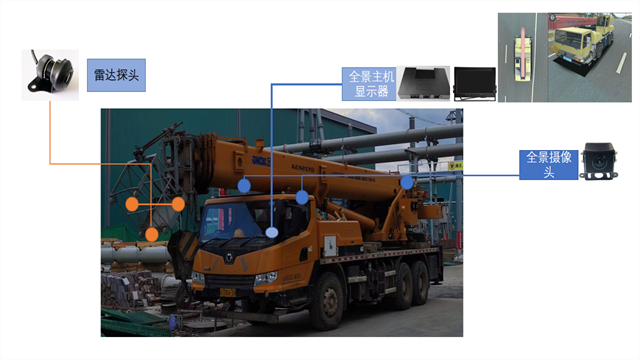
海南起重機主動安全預(yù)警系統(tǒng)
(下篇)8路4G帶網(wǎng)口輸出功能的360全景影像系統(tǒng)是一種集成了先進技術(shù)的影像系統(tǒng),其優(yōu)勢主要體現(xiàn)在以下幾個方面: 三、安全性能與應(yīng)急響應(yīng)全方WEI視野:8個廣角攝像頭能夠覆蓋車輛周邊所有視場范圍,形成360度的車身俯視圖,幫助駕駛員清楚查看車輛周邊是...
2025-04-07 -
 西藏AI多路視頻拼接系統(tǒng)開發(fā)商
西藏AI多路視頻拼接系統(tǒng)開發(fā)商(專輯二)接專輯一:多路視頻拼接與多路視覺拼接的區(qū)別主要體現(xiàn)在處理對象和拼接方式上。前者處理的是視頻流,注重實時性和連續(xù)性;后者處理的是靜態(tài)圖像,注重圖像的質(zhì)量和拼接效果。在實際應(yīng)用中,應(yīng)根據(jù)具體需求選擇合適的拼接技術(shù)。 二、拼接方式多路視頻拼接:技...
2025-04-07 -
 黑龍江云臺主動安全預(yù)警系統(tǒng)技術(shù)解決方案
黑龍江云臺主動安全預(yù)警系統(tǒng)技術(shù)解決方案機場登機橋拼接360全景影像后臺管理的應(yīng)用主要體現(xiàn)在提高操作效率、增強安全性以及優(yōu)化管理流程等方面。 一、提高操作效率實時影像拼接:通過安裝在登機橋多個位置的攝像頭,實時捕捉并拼接成360度全景影像。全景影像的拼接和顯示過程自動化。 二、增強安...
2025-04-07 -
 安徽云臺主動安全預(yù)警系統(tǒng)生產(chǎn)廠家
安徽云臺主動安全預(yù)警系統(tǒng)生產(chǎn)廠家(下篇)主動安全預(yù)警的云臺監(jiān)控管理系統(tǒng)在現(xiàn)代安全防護、遠(yuǎn)程監(jiān)控及科研觀測等領(lǐng)域具有重要意義。對其重要性的詳細(xì)闡述: 三、促進科研觀測發(fā)展穩(wěn)定觀測:云臺監(jiān)控管理系統(tǒng)在科研觀測領(lǐng)域也發(fā)揮著重要作用。其穩(wěn)定的觀測平臺和精確的調(diào)整能力有助于科研人員對特定目標(biāo)...
2025-04-07 -
 叉車AI防撞預(yù)警系統(tǒng)|叉車AI主動安全預(yù)警系統(tǒng)|叉車盲區(qū)防撞預(yù)警系統(tǒng)
叉車AI防撞預(yù)警系統(tǒng)|叉車AI主動安全預(yù)警系統(tǒng)|叉車盲區(qū)防撞預(yù)警系統(tǒng)叉車AI防撞預(yù)警系統(tǒng)叉車AI防撞預(yù)警系統(tǒng)專為叉車設(shè)計的一款智能設(shè)備,支持IP67防水,集車載視頻監(jiān)控、行車記錄儀、DSM駕駛員狀態(tài)分析系統(tǒng)、BSD盲區(qū)監(jiān)控于一體。內(nèi)置AI高性能處理芯片,采用H.265視頻編解碼技術(shù),能夠?qū)崿F(xiàn)駕駛員人臉識別、控車、安全檢測等...
2025-04-07 -
 中國香港掛車多路視頻拼接系統(tǒng)技術(shù)解決方案
中國香港掛車多路視頻拼接系統(tǒng)技術(shù)解決方案(上篇)主動安全預(yù)警系統(tǒng)中的6路視頻拼接技術(shù),其難度主要體現(xiàn)在以下幾個方面: 一、技術(shù)實現(xiàn)難度畸變矯正:由于制造、安裝、工藝等原因,攝像頭鏡頭存在各種畸變,如內(nèi)部畸變和外部畸變。這些畸變會影響視頻拼接的精度,因此在進行視頻拼接前,需要對每個攝像頭的視...
2025-04-07 -
 寧夏車輛多路視頻拼接系統(tǒng)生產(chǎn)廠家
寧夏車輛多路視頻拼接系統(tǒng)生產(chǎn)廠家(上篇4G網(wǎng)口輸出8路AI360全景影像系統(tǒng)實現(xiàn)多路視頻同顯的技術(shù)原理,主要基于視頻拼接技術(shù)、4G通信技術(shù)、系統(tǒng)集成與兼容性技術(shù),以及先進的圖像處理與傳輸技術(shù)。以下是對該技術(shù)原理的詳細(xì)闡述: 一、視頻拼接技術(shù)多攝像頭同步采集:系統(tǒng)通過8個廣角攝像頭同...
2025-04-07 -
 黑龍江起重機主動安全預(yù)警系統(tǒng)定制開發(fā)
黑龍江起重機主動安全預(yù)警系統(tǒng)定制開發(fā)在車載AI視覺系統(tǒng)中,WIFI的接入方式和實現(xiàn)方式主要如下: 接入方式 1.直接連接車載WIFI:確保車輛具備無線網(wǎng)絡(luò)功能,并在車內(nèi)找到無線網(wǎng)絡(luò)的名稱(SSID)和密碼。打開設(shè)備的WiFi設(shè)置,選擇并連接車輛提供的無線網(wǎng)絡(luò),輸入密碼后即可接入。...
2025-04-07 -
廣東工程車多路視頻拼接系統(tǒng)開發(fā)商
(上篇)8路視頻實時顯示于智能顯控終端的AI360全景影像系統(tǒng),是通過一系列先進的技術(shù)和算法實現(xiàn)的。以下是對其工作原理的詳細(xì)解析: 一、系統(tǒng)組成該系統(tǒng)主要由以下部分組成:超廣角高清攝像頭:通常安裝在車輛的前后以及兩側(cè),具備廣角拍攝能力,能夠捕捉到車輛...
2025-04-06 -
 中國臺灣船舶多路視頻拼接系統(tǒng)生產(chǎn)廠家
中國臺灣船舶多路視頻拼接系統(tǒng)生產(chǎn)廠家(中篇)4G網(wǎng)口輸出8路AI360全景影像系統(tǒng)實現(xiàn)多路視頻同顯的技術(shù)原理,主要基于視頻拼接技術(shù)、4G通信技術(shù)、系統(tǒng)集成與兼容性技術(shù),以及先進的圖像處理與傳輸技術(shù)。以下是對該技術(shù)原理的詳細(xì)闡述: 4G通信技術(shù)使得系統(tǒng)能夠?qū)崟r視頻數(shù)據(jù)、智能識別數(shù)據(jù)等傳...
2025-04-06 -
 中國澳門物聯(lián)網(wǎng)多路視頻拼接系統(tǒng)方案商
中國澳門物聯(lián)網(wǎng)多路視頻拼接系統(tǒng)方案商(下篇)多路視頻AI360全景主機通常配置了多種拓展接口,以滿足不同應(yīng)用場景和需求。以下是一些常見的拓展接口及其功能: 4,音頻接口:音頻接口通常用于連接音頻設(shè)備,如揚聲器、耳機等,實現(xiàn)聲音的實時傳輸和監(jiān)TING。這在需要同時監(jiān)控視頻和聲音的場景中尤...
2025-04-06 -
 云南小車主動安全預(yù)警系統(tǒng)方案商
云南小車主動安全預(yù)警系統(tǒng)方案商4G360全景影像系統(tǒng)集成毫米波雷達與疲勞駕駛預(yù)警系統(tǒng)在礦場上的應(yīng)用,主要體現(xiàn)在以下幾個方面: 一、360全景影像系統(tǒng)的應(yīng)用:系統(tǒng)通過車輛前后左右安裝高清廣角攝像頭,采集車身四周的高清實時畫面,通過AI視覺拼接技術(shù)處理,形成車輛周邊全景視圖。系統(tǒng)具有...
2025-04-06 -
 甘肅起重機主動安全預(yù)警系統(tǒng)定制開發(fā)
甘肅起重機主動安全預(yù)警系統(tǒng)定制開發(fā)(下篇)接上篇:4G 360全景影像網(wǎng)口視頻流傳輸為工業(yè)機器人提供視覺盲區(qū)與遠(yuǎn)程操控解決方案,是一種結(jié)合了現(xiàn)代通信技術(shù)、圖像處理技術(shù)和機器人技術(shù)的創(chuàng)新應(yīng)用。以下是對該解決方案的詳細(xì)闡述: 二、遠(yuǎn)程操控解決方案遠(yuǎn)程操控平臺:基于云計算和大數(shù)據(jù)技術(shù)構(gòu)建遠(yuǎn)...
2025-04-06 -
中國臺灣卡車多路視頻拼接系統(tǒng)開發(fā)平臺
(下篇)主動安全預(yù)警系統(tǒng)的多路視頻拼接實現(xiàn)的技術(shù)原理,主要涉及到視頻拼接技術(shù)和圖像處理算法。以下是對這一技術(shù)原理的詳細(xì)闡述: 三、應(yīng)用場景與優(yōu)勢主動安全預(yù)警系統(tǒng)的多路視頻拼接技術(shù)主要應(yīng)用于需要大范圍視野的監(jiān)控場景,如交通監(jiān)控、生產(chǎn)線監(jiān)控等。通過這一技...
2025-04-06 -
 重慶私家車主動安全預(yù)警系統(tǒng)開發(fā)商
重慶私家車主動安全預(yù)警系統(tǒng)開發(fā)商主動安全預(yù)警系統(tǒng)在火車機車上的應(yīng)用是鐵路安全領(lǐng)域的重要進展,旨在通過先進的技術(shù)手段提高列車的運行安全,減少事故發(fā)生的可能性。以下是對主動安全預(yù)警系統(tǒng)在火車機車上應(yīng)用的詳細(xì)闡述: 一、系統(tǒng)概述 系統(tǒng)集成了多種傳感器、數(shù)據(jù)處理技術(shù)和通信技術(shù),實時監(jiān)...
2025-04-06 -
 中國臺灣新能源汽車主動安全預(yù)警系統(tǒng)開發(fā)商
中國臺灣新能源汽車主動安全預(yù)警系統(tǒng)開發(fā)商(上篇)4G 360全景影像網(wǎng)口視頻流傳輸為工業(yè)機器人提供視覺盲區(qū)與遠(yuǎn)程操控解決方案,是一種結(jié)合了現(xiàn)代通信技術(shù)、圖像處理技術(shù)和機器人技術(shù)的創(chuàng)新應(yīng)用。以下是對該解決方案的詳細(xì)闡述: 一、視覺盲區(qū)解決方案360全景影像系統(tǒng): 系統(tǒng)構(gòu)成:通過在工業(yè)機...
2025-04-06 -
 重慶新能源汽車主動安全預(yù)警系統(tǒng)開發(fā)商
重慶新能源汽車主動安全預(yù)警系統(tǒng)開發(fā)商(下篇)叉車防撞預(yù)警系統(tǒng)的后臺管理實現(xiàn),主要依賴于一系列先進的技術(shù)手段和管理策略,以確保系統(tǒng)的穩(wěn)定運行和高效管理。 二,用戶權(quán)限管理:設(shè)置不同級別的用戶權(quán)限,確保只有授權(quán)人員才能訪問系統(tǒng)。記錄用戶的操作日志,以便追溯和審計。報警與通知:當(dāng)系統(tǒng)檢測到潛...
2025-04-06 -
 青海小車主動安全預(yù)警系統(tǒng)定制開發(fā)
青海小車主動安全預(yù)警系統(tǒng)定制開發(fā)擺臂車安裝4G 360全景影像集成雷達系統(tǒng)的具體應(yīng)用主要體現(xiàn)在以下幾個方面: 一、系統(tǒng)組成與功能360全景影像系統(tǒng):該系統(tǒng)通過安裝在擺臂車車身周圍前后左右的四個超廣角高清夜視攝像頭,實時采集車身四周的高清視頻畫面。經(jīng)過畸變矯正、透SHI變換、圖像拼接...
2025-04-06 -
廣東起重機主動安全預(yù)警系統(tǒng)定制開發(fā)
(專輯一)360全景影像與視覺盲區(qū)預(yù)警的集成功能在物流車的應(yīng)用中,展現(xiàn)出了顯ZHU的優(yōu)勢,極大地提升了物流車作業(yè)的安全性和效率。以下是該功能在物流車應(yīng)用中的詳細(xì)闡述: 一、技術(shù)特點與功能 實現(xiàn)360全景影像系統(tǒng): 高清攝像頭:物流車...
2025-04-05 -
河北AI多路視頻拼接系統(tǒng)開發(fā)商
(下篇)主動安全預(yù)警系統(tǒng)中的6路視頻拼接技術(shù),其難度主要體現(xiàn)在以下幾個方面: 同時,軟件算法的穩(wěn)定性和兼容性也是需要考慮的重要因素。 三、應(yīng)用場景的復(fù)雜性多變的道路環(huán)境:主動安全預(yù)警系統(tǒng)通常應(yīng)用于復(fù)雜的道路環(huán)境中,如高速公路、城市道路、山區(qū)道路...
2025-04-05