景德鎮國產捷博特答疑解惑
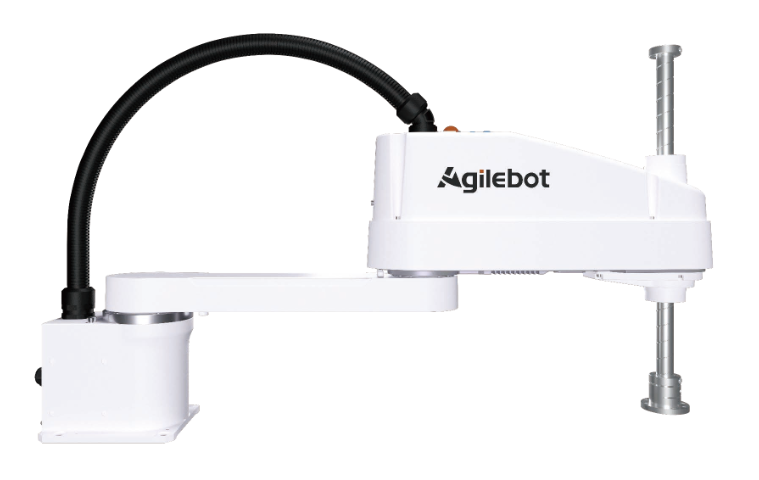
該機器人無需示教和編程,可通過圖像、視頻對用戶的動作及裝配體進行精確捕捉識別,結合工業垂類大模型進行流程拆解和裝配學習,并利用自研的單芯片多軸驅控一體運動控制器實現幾近于0的控制延時,能夠完美復現同款積木的裝配,還可實現分鐘級柔性切線,為未來工業生產的柔性化和復雜化提供了有力支持。捷勃特機器人在市場上已經取得了的成績,贏得了眾多客戶的信賴和認可。其產品廣泛應用于3C電子、汽車制造、醫療器械、食品飲料等多個行業,為客戶提供了高效、穩定、靈活的自動化解決方案,幫助客戶提高生產效率、降低成本、提升產品質量。隨著科技的不斷進步和市場需求的持續增長,捷勃特機器人將繼續秉承創新驅動的發展理念,不斷加大研發投入,提升產品性能和品質,拓展應用領域,為推動全球智能制造的發展做出更大的貢獻。關節精密設計,運轉靈活,狹小空間自由作業。景德鎮國產捷博特答疑解惑

捷博特機械手配備了簡潔直觀的操作界面,操作人員只需經過簡單的培訓即可上手。操作界面采用人性化設計,通過圖形化的操作指示和實時的狀態反饋,使操作人員能夠輕松掌握機械手的運行狀態和操作流程。同時,機械手的模塊化設計和標準化的零部件,使得維護和保養工作變得更加便捷。用戶可以根據故障提示,快速更換故障模塊,縮短了設備的停機時間,降低了維護成本。捷博特機械手通過與人工智能、物聯網、大數據等先進技術的深度融合,實現了高度的智能化和柔性化。機械手能夠根據生產任務的變化自動調整工作模式和參數,實現生產線的快速切換和智能化升級。例如,在 3C 電子行業的生產中,當產品型號發生變化時,機械手可以通過預設的程序和算法,自動調整抓取、裝配的動作和參數,無需人工重新編程和調試,**提高了生產效率和靈活性。合肥大型捷博特服務優化驅動算法,響應迅速,快速執行生產指令。
隨著工業自動化的不斷普及和深化,捷博特機械手的應用領域將不斷拓展。除了傳統的制造業領域,還將在新能源、航空航天、智能家居等新興領域得到廣泛應用。同時,隨著人工智能和物聯網技術的發展,機械手將與其他智能設備實現深度融合,構建更加智能化的生產系統。捷博特將積極構建完善的產業生態體系,加強與上下游企業的合作與協同創新。通過與零部件供應商、系統集成商、終端用戶等建立緊密的合作關系,實現資源共享、優勢互補,共同推動工業機械手產業的發展。
捷博特機械手采用模塊化設計理念,將機械手的各個組成部分設計成的模塊,如關節模塊、手臂模塊、末端執行器模塊等。模塊化設計使得機械手的組裝、調試和維護更加便捷,同時也提高了產品的通用性和可擴展性。用戶可以根據自己的實際需求,選擇不同的模塊進行組合,快速構建出滿足特定生產任務的機械手系統。捷博特機械手憑借其先進的技術和精密的制造工藝,實現了極高的定位精度和重復定位精度。在實際應用中,其定位精度可達 ±0.05mm,重復定位精度可達 ±0.02mm,能夠滿足各種高精度生產任務的需求。同時,機械手的機械結構和控制系統經過嚴格的優化和測試,具有出色的穩定性和可靠性,能夠在長時間、高度的工作環境下保持穩定運行,有效降低了設備故障率,提高了生產效率。精密制造楷模,捷博特機械手,細節之處盡顯精細品質。
在當今智能制造的浪潮中,上海捷勃特機器人有限公司憑借其的技術和創新的產品,成為了工業機器人領域的一顆璀璨明星23。上海捷勃特機器人有限公司成立于2020年10月27日13。公司以“驅動未來工廠”為愿景,以“打造智能制造基礎設施生態”為使命,專注于工業機器人和智能磁驅輸送系統的研發、生產與銷售3。捷勃特機器人在技術研發方面投入巨大,取得了一系列令人矚目的成果。其自主研發的單芯片多軸驅控一體運動控制技術處于行業水平2。攻克視覺難題,識別精確,分揀裝配高效無誤。景德鎮國產捷博特答疑解惑
智能互聯先鋒,捷博特機械手,構建智慧生產新生態。景德鎮國產捷博特答疑解惑
技術深水區:人機共生的命題當機器人開始具備自主學習和協同決策能力,捷博特正在構建全新的人機交互范式:1.數字孿生閉環系統通過虛擬調試技術,將產線部署周期從45天縮短至72小時。某家電企業應用后,新品試產成本降低60%。2.群體智能協作網絡128臺機器人通過5G-MEC實現毫秒級協同,在物流倉庫中形成動態搬運矩陣,效率較傳統AGV提升3倍。3.倫理安全防護體系“接觸即停”技術,當碰撞力超過15N時,0.05秒內切斷動力輸出,工傷事故率下降97%。景德鎮國產捷博特答疑解惑
- 日本雅馬哈機器人代理 2025-04-05
- 智能YAMAHA雅馬哈三軸機器人功能 2025-04-05
- 日本YAMAHA雅馬哈組合機器人直供 2025-04-05
- 工業TOYO皮帶滑臺價格 2025-04-05
- 高精度東佑達軌道內嵌式滑臺直供 2025-04-05
- 智能YAMAHA三軸機器人代理 2025-04-05
- 智能TOYO東佑達中空旋轉平臺代理 2025-04-04
- 自動化YAMAHA線纜 2025-04-04
- YAMAHA雅馬哈直交機器人 2025-04-04
- 日本YAMAHA機械手功能 2025-04-04
- 湖南歐洲電主軸優勢 2025-04-05
- 福建壓力筒定制價格 2025-04-05
- 金山區安裝電動調節閥供應商 2025-04-05
- 天津定制工業機器人品牌 2025-04-05
- 中山無痕拷貝設計 2025-04-05
- 太原H等級釹鐵硼報價 2025-04-05
- 四川醫院空氣凈化設備 2025-04-05
- 溫州綜合復合磨床有哪些 2025-04-05
- 高速電子多臂適用品種廣 2025-04-05
- 汽車鋼管規格 2025-04-05